交通运输部主管











船舶避碰智能决策方法研究及应用
——集美大学
船舶碰撞事故对生命财产、海洋生态环境造成的危害及其严重。现有船用导航设备缺乏科学的预警机制且不能自动提供避碰决策支持,当船员疏忽瞭望、判断失误、操作不当极易造成碰撞事故的发生。针对以上问题,集美大学李丽娜团队依托2个国家自然科学基金(面上)、7个省部级项目研究形成了船舶拟人智能避碰(PIDVCA)理论与机器自主决策的PIDVCA算法,现已申请9项发明专利,其中4项已授权,5项已受理;曾获得中国航海学会发明奖二等奖,厦门市科技进步二等奖。基于PIDVCA算法,集美大学联合北京海兰信数据科技股份有限公司和江苏镇扬汽渡有限公司分别研发了船舶航行智能避碰辅助决策系统(N-CADAS)和渡轮船岸协同航行避碰智能预警系统(FNAIES)。
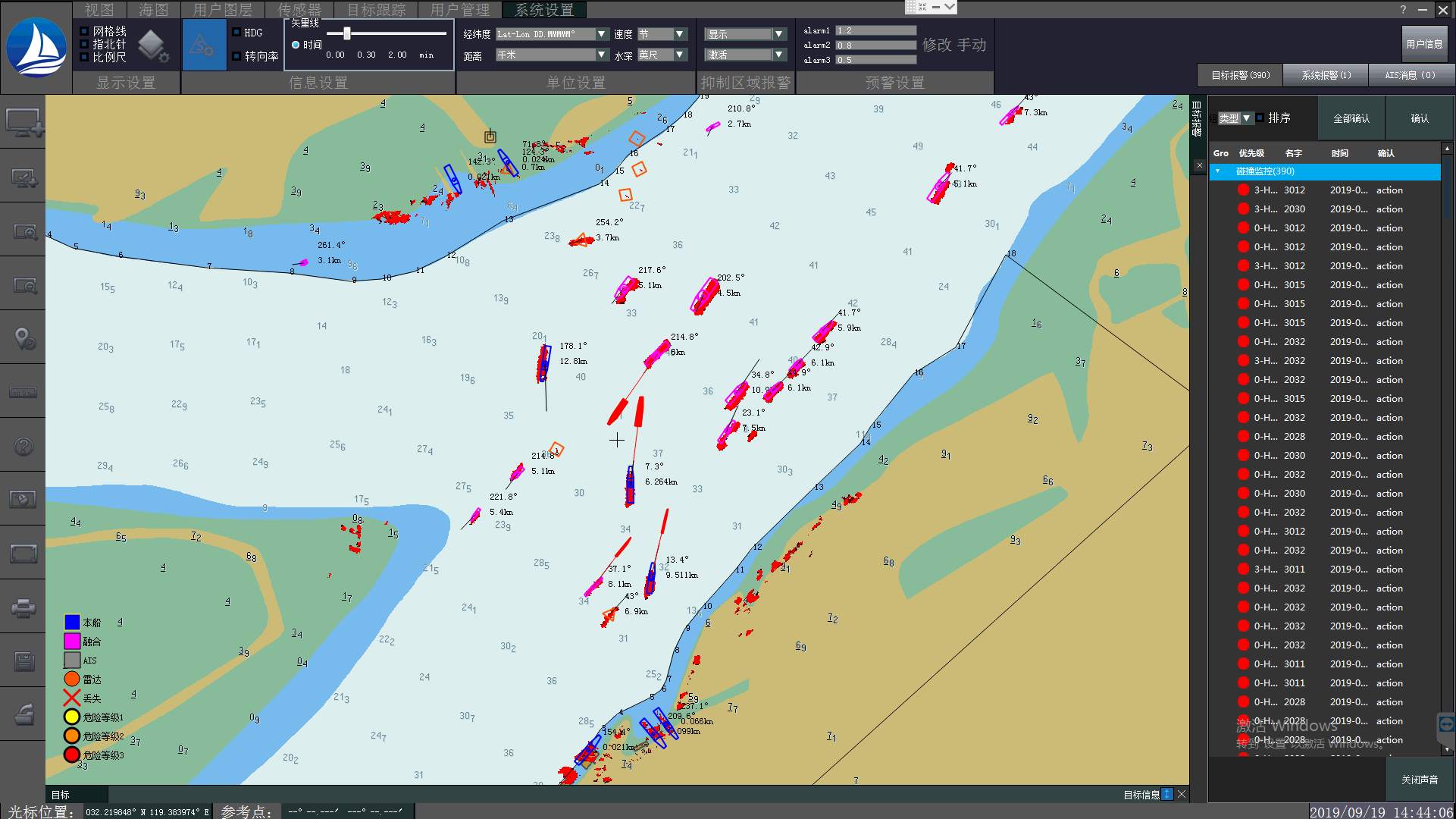
N-CADAS具备船舶碰撞危险预警功能和开阔水域航行避碰辅助决策功能。系统能根据感知系统实时获取的本船、目标船及环境信息,模拟经验丰富的驾驶员遵循《国际海上避碰规则》并体现良好船艺,基于创建的自适应碰撞危险评判模型进行碰撞危险准确预警,智能避碰决策方案(避让航向、避让时机和预测复航时机)自动生成,已具备自动感知、认知和决策生成及优化的“拟人”智能。系统通过CCS和DNV认证,首次实现开阔水域避碰辅助决策功能的商船实船装配,取得了核心技术源头创新。
FNAIES用双岸基雷达系统对船舶尺度进行自动识别,利用AIS/RADAR数据融合技术实时精准获取江面移动目标的动态信息,通过甚高频(VHF)、视频监控系统(CCTV)以及WIFI通信网络实现船岸信息的实时交互,运用专家经验知识及船舶避碰几何分析原理实现汽渡轮航行避碰智能预警。岸基端系统为岸基监管人员提供在航渡轮的实时碰撞危险等级预警,并将预警信息发送到渡轮船载端,以文字、声光和语音的形式提醒汽渡轮驾驶员。系统实现了复杂水域碰撞危险三级预警,碰撞危险预警准确率达99.5%,解决了岸基雷达、VTS等船舶航行安全监管系统存在的碰撞危险误警频发的问题。



编辑:翟慧
审核:连萌

 换一换
换一换